 FR
FR


CARACTÉRISTIQUES DU MOTEUR
■ Caractéristiques du moteur à induction
1, généralement, le moteur à induction micro se réfère au moteur mis en rotation par l'induction. Le moteur à induction repose sur le condensateur et l'électromagnétisme lors du démarrage et de la rotation. Bien que son couple de démarrage ne soit pas très élevé, il a une structure simple, un rendement élevé et peut tourner en continu.
2, le moteur monophasé a une direction inverse avec la rotation lorsqu'il est utilisé. Pis change le sens de rotation du moteur monophasé seulement après avoir arrêté le moteur.
3, le moteur triphasé repose sur une alimentation triphasée. Il a un rendement élevé et peut obtenir un couple de démarrage élevé.
■ Caractéristiques du moteur réversible
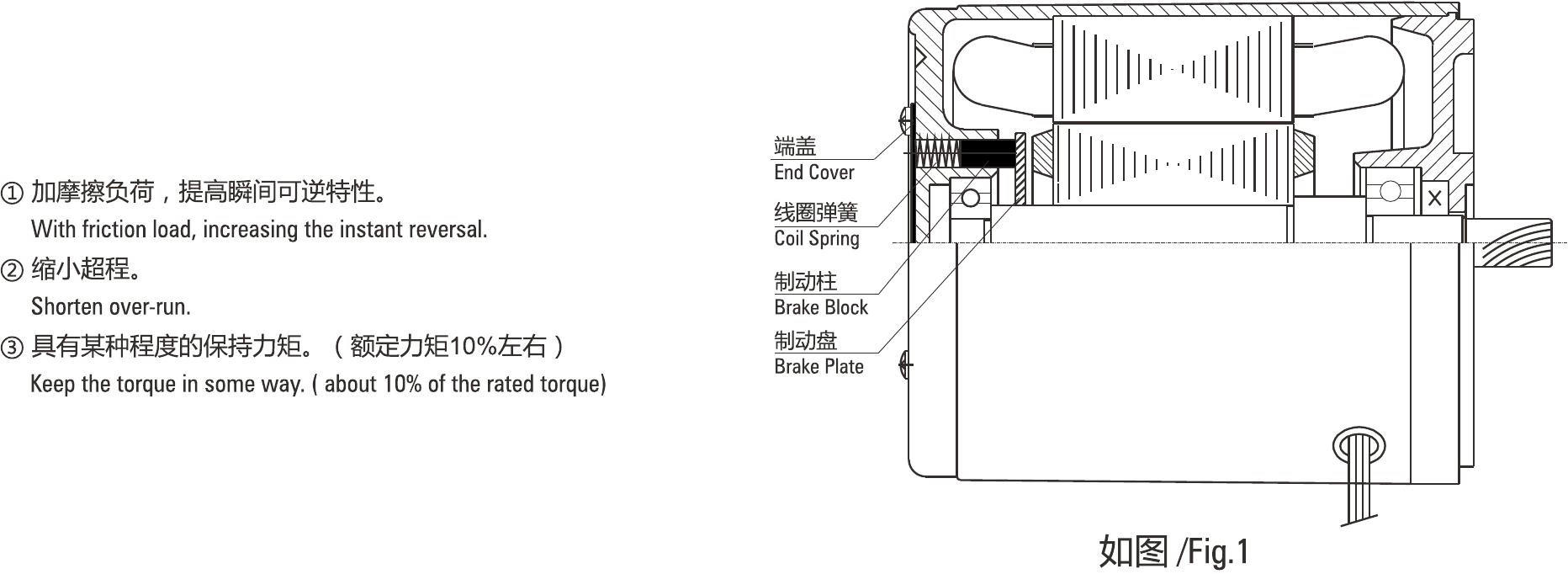
1, le moteur réversible a un frein à friction à l'arrière du corps du moteur, qui est conçu pour les applications où l'inversion de direction est fréquemment requise. Pour le frein à friction, veuillez vérifier le tirage 1. L'humidité avec ressort heurte le disque de frein rotatif et alimente en pression continue. Les fonctions du frein à friction sont les suivantes:
2, le couple de maintien ou plus du frein à friction et de la surcharge sont répertoriés dans le tableau 1. Il est uniquement à titre de référence. Comme il changera en fonction de la période de rotation ainsi que de la température. Veuillez également noter que le couple peut être un peu inférieur à celui indiqué dans le tableau lors de son utilisation initiale.
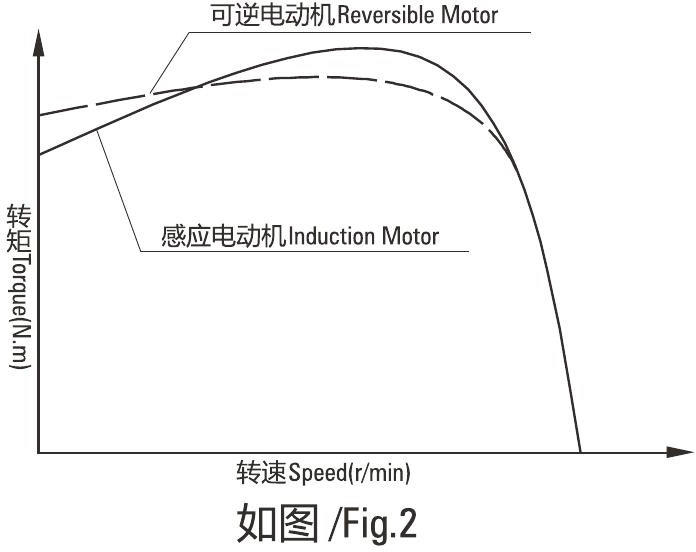
3, le moteur réversible, comme le moteur à induction, est démarré par le condensateur et a la même caractéristique de couple que le moteur à induction. Mais le moteur réversible est conçu avec un couple de démarrage plus élevé pour augmenter les caractéristiques d'inversion instantanée. Veuillez vérifier le dessin 2.
■ Tableau 1. Conserver le couple et le dépassement
| Phase | Taille | Production | Modèle de moteur | Gardez le couple | Envahi | |
| mm | W | N.cm | Kgf.cm | Cycles | ||
| Sing-Phase | 60 | 6 | 2RK6 | 0.5 | 0.05 | 4 |
| 70 | 15 | 3RK15 | 1.3 | 0.13 | 5 | |
| 80 | 25 | 4RK25 | 1.5 | 0.14 | 5 | |
| 90 | 40 | 5RK40 | 4.0 | 0.40 | 6 | |
| 60 | 5RK60 | |||||
| 90 | 5RK90 | |||||
| 120 | 5RK120 | |||||
■ Caractéristiques du moteur de frein électromagnétique de type activé hors tension
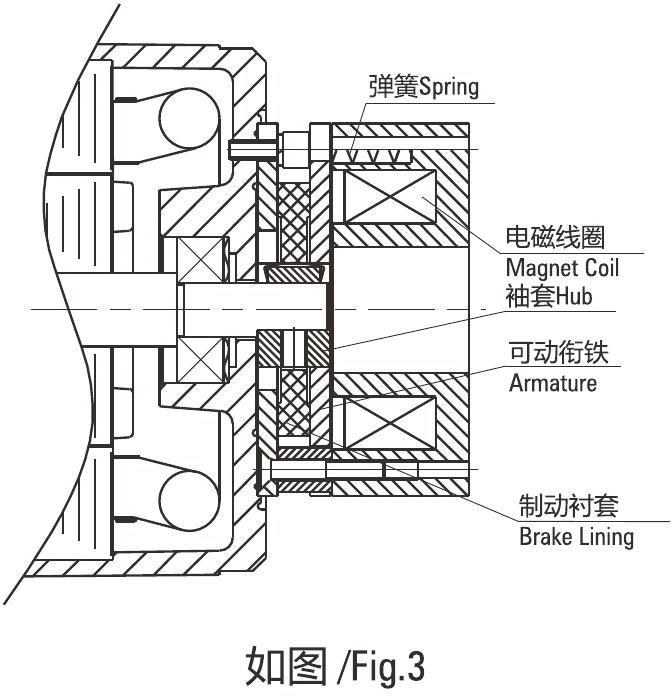
1 、 Structure et principe de fonctionnement
Le tableau 3 est la structure du moteur de frein électromagnétique. Nous produisons le type activé hors tension. En exerçant la tension sur le bobinage, il magnétisera l'armature pressée par le ressort. Le moteur sera en phase de rotation, lorsqu'il y a un jeu entre l'armature et la jante de frein. Une fois la tension d'enroulement coupée, sous l'influence du ressort, l'armature appuie sur la jante de frein, ce qui va créer une force de freinage. Ensuite, le moteur s'arrête.
2, les caractéristiques du frein électromagnétique
Il s'agit d'un frein électromagnétique de type AC Power Off activé qui est connecté directement au moteur. Il s'arrêtera de clignoter et conservera la charge lorsque l'alimentation est coupée. Il maintiendra le couple entre 0,05 et 2,0 N.m. Il est particulièrement adapté au frein de sécurité en cas de mise hors tension inconsciente. L'électromagnétique peut changer fréquemment de direction. Il peut être arrêté 6 fois par minute. Mais assurez-vous que cela dure 3 secondes ou plus.
Après avoir défini une boucle de commutation dans le frein, celui-ci peut partager l'alimentation avec le moteur.
※ La valeur est standard. Ce sera un changement dans des conditions différentes. Lorsqu'il est réellement utilisé, assurez-vous que la température de surface du moteur est inférieure à 90 ° C.
3, les caractéristiques pour l'heure de départ et l'heure de freinage
L'heure de démarrage désigne l'heure de l'heure de démarrage du moteur plus le temps de desserrage du frein électromagnétique. Le temps de freinage désigne le temps écoulé entre la coupure de courant et le moment de l'arrêt complet du moteur. Le dépassement, l'heure de démarrage et le temps de freinage seront différents selon les différentes applications.
■ Tableau 2. Frein électromagnétique (type activé hors tension)
| Phase | Taille de sortie | Tension V | Fréquence Hz | Courant A | Entrée W | Gardez le couple | Envahi | ||
| MM | W | N.cm | Kgf.cm | Cycles | |||||
| 1 phase | 70 | 15 | 110 120 220 230 | 50/60 | 0.091 | 8.2 | 0.5 | 50 | 3.5 |
| 80 | 25 | ||||||||
| 90 | 40 | ||||||||
| 60 | |||||||||
| 0.111 | 10.0 | 1.0 | 100 | ||||||
| 90 | |||||||||
| 120 | |||||||||
| 100 | 120 | ||||||||
| 140 | |||||||||
| 200 | 0.144 | 13.0 | 2.0 | 200 | |||||
| 3 phases | 60 | 6 | 220 ~ 230 | 50/60 | 0.073 | 6.6 | 0.25 | 25 | |
| 70 | 15 | 380 ~ 415 | 0.037 | 6.6 | 0.25 | 25 | |||
| 80 | 25 | 200 ~ 230 380 ~ 415 | 0.091 | 8.2 | 0.5 | 50 | |||
| 90 | 40 | ||||||||
| 60 | 0.046 | 8.2 | 0.5 | 50 | |||||
| 90 | 200 ~ 230 380 ~ 415 | 0.111 | 10.0 | 1.0 | 100 | ||||
| 120 | |||||||||
| 100 | 120 | 0.056 | 10.0 | 1.0 | 100 | ||||
| 140 | |||||||||
| 200 | 200 ~ 230 380 ~ 415 | 0.144 | 13.0 | 2.0 | 200 | ||||
| 0.144 | 13.0 | 2.0 | 200 | ||||||
■ Les caractéristiques du moteur de contrôle de vitesse
1, c'est une unité du contrôleur et du moteur. Il n'a besoin de se connecter qu'une seule fois. La vitesse peut être facilement ajustée par le potentiomètre. Le contrôleur est fixé avec une boucle de contrôle de vitesse, un condensateur, une activation de vitesse, etc. Il n'y a pas de fonction d'arrêt instantané dans l'unité.
2, le contrôleur peut rendre la vitesse variable entre 90-1350 tr / min à 50 Hz et 90-1650 tr / min à 60 Hz.
3, veuillez ne pas faire fonctionner le moteur à basse vitesse pendant longtemps pour éviter la surchauffe.











